

In our last post, we talked about what 3D reconstruction is and why RoadBotics is pursuing this technology. Now, let’s dive a little deeper into how we create a 3D reconstruction.
Given a real-world scene like a parking lot or all of the sidewalks for a city, how can we create a digital copy of it?
Understanding the world in 3D has been an open problem in the field of computer vision for several decades, inspiring the creation of many methods for computers to capture 3D structure. Most methods fall into one of four categories: structured light, LiDAR, deep neural networks, and SLAM.
Before we get to how each method works, one thing to note is that although the goal is to create a digital representation of objects using surfaces and textures, 3D reconstruction begins with a collection of 3D points in space, known as 3D point clouds. Each of the methods below provides a different way to capture a 3D point cloud of a scene.
Now let’s talk about how each method works.
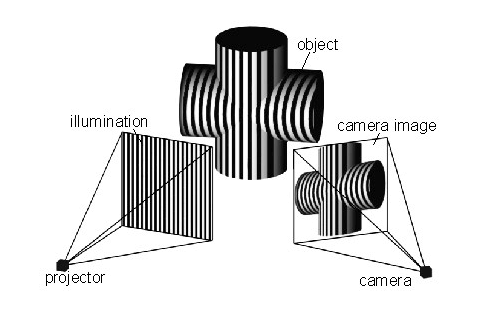
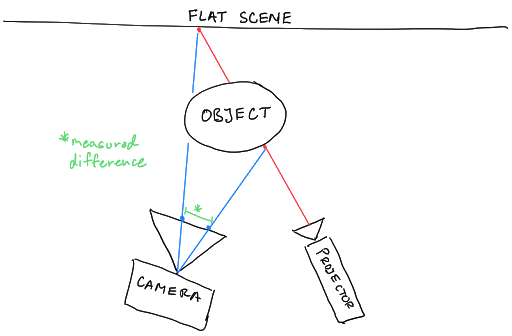
Making a 3D reconstruction using structured light usually requires two pieces of equipment: a projector and a camera. The projector projects a pattern of dots onto the scene to reconstruct, and the camera takes a picture of the scene with those overlaid dots.
A computer then measures the distance in pixels between each dot in the captured image and where the dot would be if the scene was a flat surface. Using these distances, the computer can calculate the real-world depth of each dot in the scene, creating a depth map that can be easily converted into a point cloud. This is the basis for Microsoft Kinect (version 1) and Apple’s FaceID.
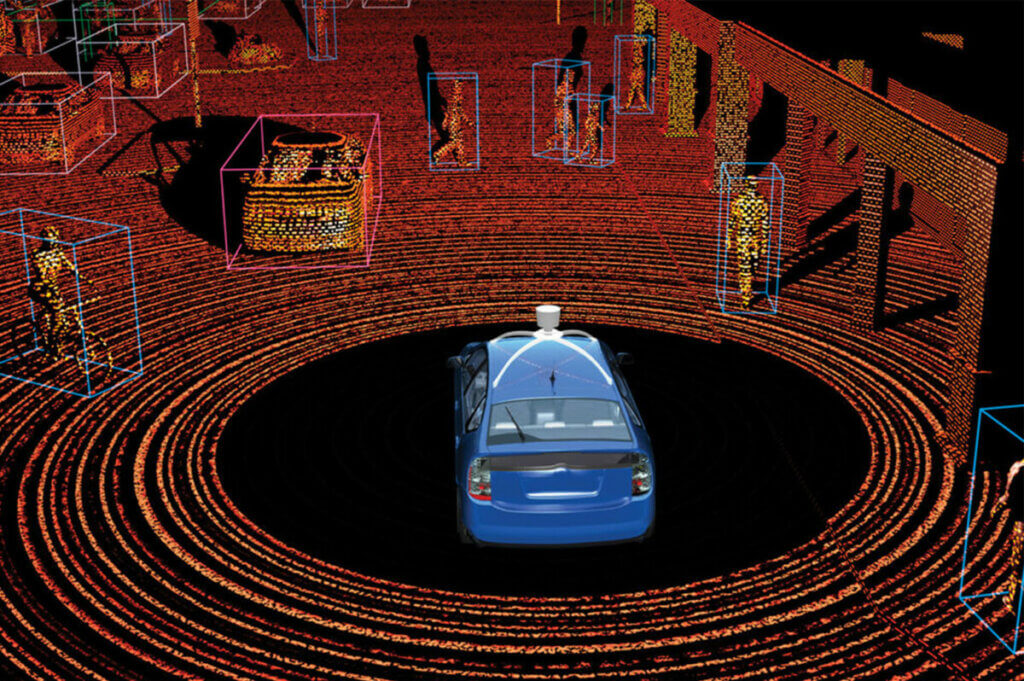
LiDAR stands for light detection and ranging. It is a technology heavily used by autonomous vehicle companies to enable their cars to capture a 3D view of the world around them in real time.
Like structured light, it also requires specialized equipment: in this case, a LiDAR scanner, which is a combination of a synchronized laser and camera. The LiDAR scanner works by flashing the laser to illuminate a single point in the scene and then measuring the time it takes for the light from the laser to bounce off an object and return to the camera. This measurement is generally called time-of-flight and, using the known constant for the speed of light, can be used to calculate the distance from the LiDAR scanner to the illuminated object. This is then repeated for many points across the whole scene to build up a 3D point cloud. In the image above, you can see an example of a LiDAR point cloud. The points are arranged in concentric rings created by and centered on a rotating LiDAR scanner mounted to the top of the blue Prius. In the gif to the left, you can see an animation of how one of those ring-of-points is created.
Photo Source: https://en.wikipedia.org/wiki/Lidar#/media/File:LIDAR-scanned-SICK-LMS-animation.gif
Deep neural networks (DNNs) are the newest set of methods for performing 3D reconstructions. While structured light and LiDAR methods rely heavily on specialized sensors to capture 3D data, DNNs usually only require a 2D image or pair of 2D images as input. Using sophisticated pattern recognition to estimate the position of objects, a DNN can generate the 3D structure of the scene. This often takes the form of a DNN which takes in an image and produces a depth map.
It should be noted that such a DNN is a machine learning algorithm. This means it must first be trained before it can be used for 3D reconstruction. And training requires images where we already have ground-truth 3D data for each image.
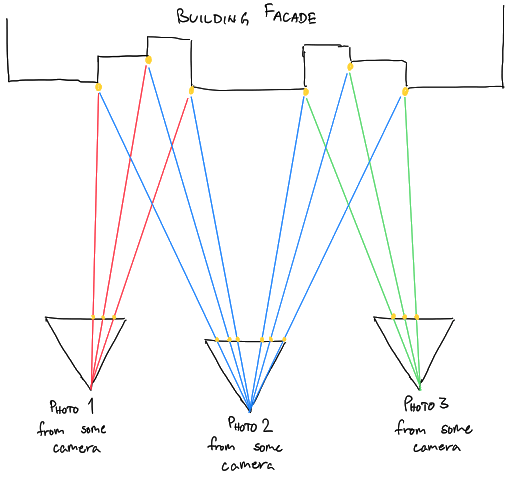
SLAM stands for simultaneous localization and mapping. SLAM is similar to DNNs in that it is also an attempt to perform 3D reconstruction without the use of specialized sensors. It only requires a set of photographs of the scene to reconstruct. However, unlike DNNs, SLAM uses geometry in the form of mathematical models for each of the cameras that captured the photos and the geometric constraints of the physical world.
It starts with a set of photos of the scene to reconstruct as the input. This set can be anywhere from 10s of photos 1000s of photos. SLAM then finds unique points in the scene, where each point appears in at least a few photos. It then solves a set of linear equations (and some nonlinear equations) to figure out the position of those points in the scene as well as the position and orientation of the cameras that must have occurred in order for the points to appear the way they did in each photo.
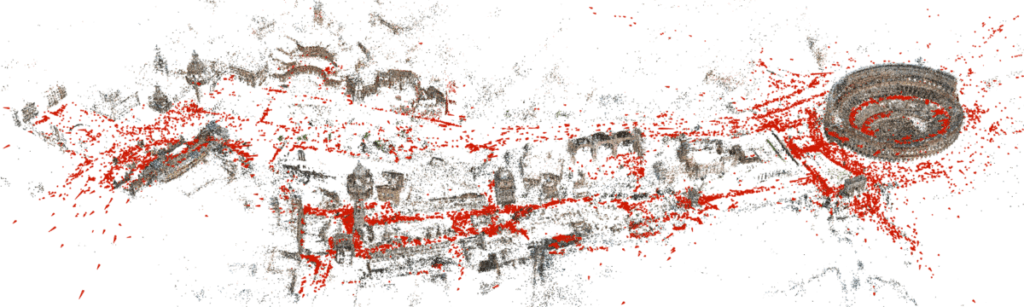
The picture above is a reconstruction of central Rome created by a SLAM software package called COLMAP. You may recognize the Colosseum on the far right. Each of the red dots is actually a little side-ways pyramid to show the position and orientation of a camera that took one photo used in this reconstruction. All the other points that make up the buildings, or parts of buildings, are those unique points that the SLAM algorithm found in multiple photos used for this reconstruction.
Our goal at RoadBotics is to create a way for governments to easily and scalably produce accurate 3D models of their infrastructure. With that in mind, we have chosen to develop a SLAM-based approach for a number of reasons.
The two biggest reasons are 1) SLAM techniques produce visually recognisable 3D reconstructions and 2) SLAM doesn’t have specialized hardware requirements beyond high-quality image capture, which means that just like with other RoadBotics solutions, a customer only needs a smartphone.
To elaborate on the first point, SLAM is capable of producing 3D reconstructions that not only have the 3D structure of the scene, but also the colors of the scene.
Structured light and LiDAR usually only reproduce the 3D structure without any color because they generate their own illumination in the non-visible light spectrum. In theory, color can be added later from pictures taken from a camera mounted nearby, but this reveals a second problem.
Point clouds generated by structured light and LiDAR tend to be on the order of 100s to 100,000s of points. This is a limitation of the hardware since they have to illuminate the scene on their own, point-by-point. SLAM, in contrast, can produce reconstructions in the millions or even tens of millions of points, in part because modern cameras pack millions of pixels. That increase in granularity of detail is critical since visual assessment is a key deliverable.
The second point is also important: SLAM can produce high quality reconstructions from images taken by a smartphone camera. The ubiquity of smartphones and the ease of use of their cameras makes SLAM a much better foundation than structured light or LiDAR, which require special hardware and software that would require customer training.
Deep neural networks are also capable of these two points: producing high density, colorized reconstructions without the need for special sensors. However, DNNs have their own drawbacks such as the large amount of labeled data required to train a DNN and the black-box nature of neural networks which can make diagnosing errors more difficult.
RoadBotics is not the only company to see potential in SLAM-based 3D reconstruction. There are a number of open-source software packages that implement various SLAM techniques: VisualSFM, OrbSLAM, VinsMONO, OpenMVG, COLMAP, and more. However, these packages tend to work very well under a set of assumptions that have evolved in tandem with the typical use cases for the software, like the examples we discussed earlier in our earlier blog post. These assumptions include that you are capturing an object or a single scene (as opposed to a very long continuous asset, like a sidewalk); that you are willing to accept defects or able to manually correct them after making the reconstruction; and that you’re building a single reconstruction (like the COLMAP reconstruction of central Rome shown above) rather than building many in a scalable process and stitching them together.
None of these assumptions are true for RoadBotics; we emphasize automated, highly-scalable solutions because they are cost-efficient and necessary for our clients with assets at their scale. So while these software packages are useful to us, they don’t get us very far in producing the kinds of reconstructions that will help our clients.
Creating city-scale 3D reconstructions of infrastructure, like roads or sidewalks, that are accurate enough for visual inspection thus require developing novel solutions to a number of problems. Some of them – as mentioned above – requires creating new software that will produce, store, and display these very large reconstructions. But there are also unsolved research problems in capturing assets of this sort that have mostly remained unaddressed till now, that we will talk about in our next blog post. These problems are the focus of our work, and solving them will enable a revolution in infrastructure inspection and maintenance.
3D reconstructions at scale are a big step to automating things like sidewalk measurements for ADA compliance to help make sure a city’s resources serve all of their constituents effectively and efficiently.
Stay tuned as we dive deeper into these issues and reveal sneak peeks into how we’re solving them!

© 2023 RoadBotics, Inc | 322 North Shore Drive, Suite 200, Pittsburgh, PA 15212
| Cookie | Duration | Description |
|---|---|---|
| __hssrc | session | This cookie is set by Hubspot whenever it changes the session cookie. The __hssrc cookie set to 1 indicates that the user has restarted the browser, and if the cookie does not exist, it is assumed to be a new session. |
| _GRECAPTCHA | 5 months 27 days | This cookie is set by the Google recaptcha service to identify bots to protect the website against malicious spam attacks. |
| ak_bmsc | 2 hours | This cookie is used by Akamai to optimize site security by distinguishing between humans and bots |
| citrix_ns_id | session | This cookie is set by the provider Citrix, a web application firewall. This cookie is used for protecting the website against known and unknown attacks. |
| cookielawinfo-checkbox-advertisement | 1 year | Set by the GDPR Cookie Consent plugin, this cookie is used to record the user consent for the cookies in the "Advertisement" category . |
| cookielawinfo-checkbox-analytics | 1 year | Set by the GDPR Cookie Consent plugin, this cookie is used to record the user consent for the cookies in the "Analytics" category . |
| cookielawinfo-checkbox-functional | 1 year | The cookie is set by the GDPR Cookie Consent plugin to record the user consent for the cookies in the category "Functional". |
| cookielawinfo-checkbox-necessary | 1 year | Set by the GDPR Cookie Consent plugin, this cookie is used to record the user consent for the cookies in the "Necessary" category . |
| cookielawinfo-checkbox-others | 1 year | Set by the GDPR Cookie Consent plugin, this cookie is used to store the user consent for cookies in the category "Others". |
| cookielawinfo-checkbox-performance | 1 year | Set by the GDPR Cookie Consent plugin, this cookie is used to store the user consent for cookies in the category "Performance". |
| CookieLawInfoConsent | 1 year | Records the default button state of the corresponding category & the status of CCPA. It works only in coordination with the primary cookie. |
| elementor | never | This cookie is used by the website's WordPress theme. It allows the website owner to implement or change the website's content in real-time. |
| JSESSIONID | session | The JSESSIONID cookie is used by New Relic to store a session identifier so that New Relic can monitor session counts for an application. |
| viewed_cookie_policy | 1 year | The cookie is set by the GDPR Cookie Consent plugin to store whether or not the user has consented to the use of cookies. It does not store any personal data. |
| Cookie | Duration | Description |
|---|---|---|
| A3 | 1 year | No description |
| AnalyticsSyncHistory | 1 month | No description |
| citrix_ns_id_.d2d.gsa.gov__wlf | session | No description |
| citrix_ns_id_.gsa.gov__wlf | session | No description |
| li_gc | 5 months 27 days | No description |
| ln_or | 1 day | No description |
| m | 2 years | No description available. |
| NSC_IUUQ-Ebub2Efd | session | No description |
| SSESSe6f64672c023222bafbc47f83a5ecbd4 | 23 days 4 hours | No description |
| TS01c2db25 | session | No description |
| Cookie | Duration | Description |
|---|---|---|
| _fbp | 3 months | This cookie is set by Facebook to display advertisements when either on Facebook or on a digital platform powered by Facebook advertising, after visiting the website. |
| c | 1 year | This cookie is set by Rubicon Project to control synchronization of user identification and exchange of user data between various ad services. |
| CONSENT | 2 years | YouTube sets this cookie via embedded youtube-videos and registers anonymous statistical data. |
| fr | 3 months | Facebook sets this cookie to show relevant advertisements to users by tracking user behaviour across the web, on sites that have Facebook pixel or Facebook social plugin. |
| IDE | 1 year 24 days | Google DoubleClick IDE cookies are used to store information about how the user uses the website to present them with relevant ads and according to the user profile. |
| test_cookie | 15 minutes | The test_cookie is set by doubleclick.net and is used to determine if the user's browser supports cookies. |
| tuuid | 1 year | The tuuid cookie, set by BidSwitch, stores an unique ID to determine what adverts the users have seen if they have visited any of the advertiser's websites. The information is used to decide when and how often users will see a certain banner. |
| tuuid_lu | 1 year | This cookie, set by BidSwitch, stores a unique ID to determine what adverts the users have seen while visiting an advertiser's website. This information is then used to understand when and how often users will see a certain banner. |
| VISITOR_INFO1_LIVE | 5 months 27 days | A cookie set by YouTube to measure bandwidth that determines whether the user gets the new or old player interface. |
| YSC | session | YSC cookie is set by Youtube and is used to track the views of embedded videos on Youtube pages. |
| yt-remote-connected-devices | never | YouTube sets this cookie to store the video preferences of the user using embedded YouTube video. |
| yt-remote-device-id | never | YouTube sets this cookie to store the video preferences of the user using embedded YouTube video. |
| yt.innertube::nextId | never | This cookie, set by YouTube, registers a unique ID to store data on what videos from YouTube the user has seen. |
| yt.innertube::requests | never | This cookie, set by YouTube, registers a unique ID to store data on what videos from YouTube the user has seen. |
| Cookie | Duration | Description |
|---|---|---|
| __hstc | 5 months 27 days | This is the main cookie set by Hubspot, for tracking visitors. It contains the domain, initial timestamp (first visit), last timestamp (last visit), current timestamp (this visit), and session number (increments for each subsequent session). |
| _ga | 2 years | The _ga cookie, installed by Google Analytics, calculates visitor, session and campaign data and also keeps track of site usage for the site's analytics report. The cookie stores information anonymously and assigns a randomly generated number to recognize unique visitors. |
| _ga_SQVZMMXYCW | 2 years | This cookie is installed by Google Analytics. |
| _gat_gtag_UA_88652169_15 | 1 minute | Set by Google to distinguish users. |
| _gat_UA-88652169-1 | 1 minute | A variation of the _gat cookie set by Google Analytics and Google Tag Manager to allow website owners to track visitor behaviour and measure site performance. The pattern element in the name contains the unique identity number of the account or website it relates to. |
| _gcl_au | 3 months | Provided by Google Tag Manager to experiment advertisement efficiency of websites using their services. |
| _gid | 1 day | Installed by Google Analytics, _gid cookie stores information on how visitors use a website, while also creating an analytics report of the website's performance. Some of the data that are collected include the number of visitors, their source, and the pages they visit anonymously. |
| hubspotutk | 5 months 27 days | HubSpot sets this cookie to keep track of the visitors to the website. This cookie is passed to HubSpot on form submission and used when deduplicating contacts. |
| Cookie | Duration | Description |
|---|---|---|
| __cf_bm | 30 minutes | This cookie, set by Cloudflare, is used to support Cloudflare Bot Management. |
| __hssc | 30 minutes | HubSpot sets this cookie to keep track of sessions and to determine if HubSpot should increment the session number and timestamps in the __hstc cookie. |
| bcookie | 1 year | LinkedIn sets this cookie from LinkedIn share buttons and ad tags to recognize browser ID. |
| bscookie | 1 year | LinkedIn sets this cookie to store performed actions on the website. |
| lang | session | LinkedIn sets this cookie to remember a user's language setting. |
| lidc | 1 day | LinkedIn sets the lidc cookie to facilitate data center selection. |
| messagesUtk | 5 months 27 days | HubSpot sets this cookie to recognize visitors who chat via the chatflows tool. |
| tads_uid | 5 years | The domain of this cookie is owned by Technorati.This cookie helps the user to share pages through social networking sites. The main purpose of this cookie is advertising. |
| UserMatchHistory | 1 month | LinkedIn sets this cookie for LinkedIn Ads ID syncing. |